算法简介:晶片也是一种宝石
这篇文章主要讲的是最短路径算法,从最低级的 Floyd 开始,到支持最长路的 Dijskra 的初级代码及其优化,还有支持负边权的 Bellman-Ford 算法。最短路径问题作为图论中解决大多数问题的基础,可以与很多图论模型混搭,是一个泛用型很强的问题类型。
算法演示:不能少了冲天转转
例一:改良型平衡稳定器
首先,作为多个最短路算法的始祖(可能吧,毕竟这个是基础)一些关于最短路的基础概念都是由 Floyd 算法引导出来的,所以我们首先来讲的算法,就是 Floyd 算法。
首先,我们给定一张图。不管他是无向图还是有向图,我们都可以求最短路。而计算出来的最短路,分为两种:
- 求出一个点到所有点之间的最短路 —— 单源最短路
- 求出所有点到所有点之间的最短路 —— 全源最短路
那么我们要用的 Floyd 算法,就是求全源最短路的一个最短路算法。试想一下,如果要求我们在 $O(n^3)$ 的时间复杂度内,实现全源最短路,我们会怎么做?不难想到,就是动态规划。
如果我们设置一个状态 $dp[u][v]$ 表示点 $u$ 到 $v$ 的最短路,那么怎么去求最短路呢? 不难想到,最短路一定是由最短路拼接而成。因为如果最短路上的某一个点到达端点的长度不是最短路,那么一定可以找到一个更短的路径替换掉他。
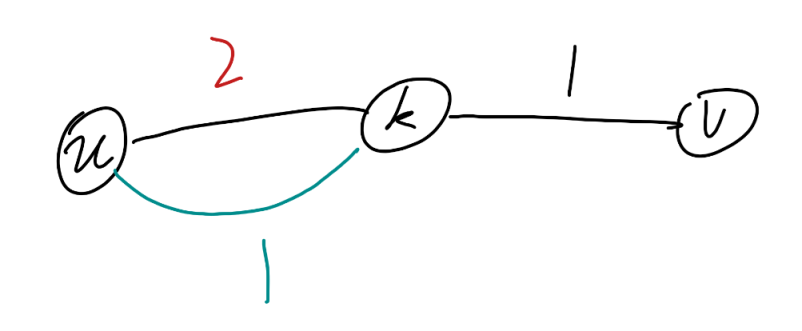
就像这张图片所展示的,$u\rightarrow k$ 的黑色路径不是最短路,所以说我们可以用青色的路径替换掉黑色路径。也就是说,最短路径一定是由两个最短路径拼接而成。我们可以轻松的写出转移方程:
但是,这个转移方程中 $u,v,k$ 的枚举顺序如何排列?随便排列吗?显然不是。我们要使得 $dp[u][v]$ 被 $dp[u][k]+dp[k][v]$ 转移,我们肯定要保证这个值已经被计算了,不然一定是得不到正确值的。所以说,我们的枚举顺序就可以确定:
1 | for(int k = 1; k <= n; k++) { |
然后就是初始值的设定。首先,自己到自己,都是不需要费用的,设置为 0 ;已知的边,自己设了就可以;其他的显而易见都不知道,设置为极大值。显而易见,这样的动态规划思想对于任何的图都不会有问题。这就是 Floyd 算法的全过程了,其中状态转移的过程,在最短路中被称为松弛操作,这个名词也可能广泛出现于一些动态规划题目中。
Floyd 算法的思想是极其常用的,这种不断松弛的操作思想,有时会出现在一些非图论的动态规划题目中,也算是一本万利的一种算法思想。
例二:敌人越多越要小心
接下来,就是一个重要的算法,也是最常用的最短路算法,Dijkstra 算法。在我的最小生成树文章中,曾经提到过一个名字叫做 Prim 的算法。这个算法与 Dijkstra 算法有着极高的相似度。具体的来讲,两者都是基于贪心去扩大点集合而去计算的一种算法,而这种贪心的思想,就导致了 Dijkstra 算法不可以有负边权,具体为什么我们会在下文讲到。
我们都知道,想要求得最短路,上面的 Floyd 算法中也说了最短路是最短路的拼接,所以说 Dijkstra 算法秉承着这样的思想,我们对于已经保证求得最短路的点,去找到他们之中距离源(开始节点)最近也就是最短路最小的点,从这个最小的点开始,继续往下推,这样就可以保证求出从源开始所有点的最短路。
但是说,这样的贪心思想就突显了一个问题,负边权。我们可以举一个例子:
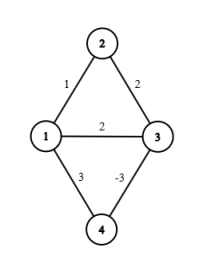
显然的,用人脑算出来,1 到 3 的最短路,就是 0 。但是,如果我们按照最短路的思想,我们会先走到 $2$ 求出 $dis[2]=1$ 然后标记掉他,因为每一个点都只能扩散一次,如果没有这个优化,我们会陷入死循环,有一些点永远得不到计算。然后从 $2$ 扩散到 3 ,得到 $dis[3] = 3$ 然后标记了他。这是候重点就来了,他会去跑到四,得到 $dis[4]=0$ 然后结束。因为所有点都已经求好了。然后就发现了 $dis[3]$ 的值其实是错误的。这也是 Dijkstra 为什么不可以求负边权的原因。
那么按照这样的思想,我们不难写出一个朴素版本的 Dijkstra 算法。
1 | void Dijkstra(int u) { |
显而易见的,就和当时的 Prim 算法一样,我们显然不需要用这么繁杂的方式去得到最小值,这也就意味着,Dijkstra 算法有着各种各样的优化,比如说线段树,二叉堆,斐波那契堆等等等等,其中斐波那契堆的复杂度最低 $O(n\log(n+m))$ ,但是因为代码复杂,没有太大的性价比,所以说我们一般来讲都用优先队列优化,也就是 STL 中的 $\tt priority_queue$ 。
1 | typedef pair<ll, int > pii; |
这个的复杂度比较难评,因为这个代码的一些性质,你会发现已经扩散的点,其实是有可能二次被插入到这里的,但是插入后他不会修改,而是当被访问的时候发现已经扩散就弹出去了。也就是说,我们的优先队列中元素的数量是 $m$ 量级的。所以说,复杂度就是 $O(m\log m)$ 其中 $m$ 是边的数量。
这时候,我们就发现,Dijkstra 算法的复杂度,其实也不低,当这张图是稠密图的时候,也就是说 $m≈ n^2$ 的时候,复杂度也会变得不靠谱,甚至不如 Floyd 。所以说,当图越来越稠密,暴力的复杂度性价比会越来越高。这是图论题的特有神奇现象,最小生成树的时候也有。
例三:迄今为止所有收藏
接下来就是一个颇具传奇色彩的最短路算法 —— Bellman-Ford 算法。这个算法可能大多数人没听说过,但他有着多如繁星般的优化方式,而且他的优化方式都有不同级别的挂,著名的 SPFA 算法,就是由他优化而来。
关于SPFA,他死了 —— 典故重现
其实 Bellman-Ford 算法,既可以说是 Dijkstra 算法的基础,也可以说是 Dijkstra 算法的升级。他的基础之处,在于它的松弛操作,可以说是 Dijkstra 朴素版本的基础;他的升级之处,在于可以知道是否在原图中存在负环,也可以计算有负边权的图。
首先,它的原理比较暴力,就是一直对于图上的边经行松弛操作,直到不可以松弛为止。我们知道最短路的点是不可重复的,也就是说最短路不可以成环,也就是说全图的松弛操作只会有 $n-1$ 次,综合复杂度就是 $O(nm)$ 。
而我们说他可以计算出负环,是因为负环一直满足递减的要求,也就是说,他会一直转圈,我们只需要判断 $n-1$ 次松弛完事后,再次松弛会不会有数值变化即可。
1 | struct Edge { |
代码来自 OI-wiki 。
算法实战:这一次我一定要赢
查看相关算法标签喵!



